进程间通信(IPC, inter-process communication)是多个执行上下文实现数据交互的重要功能,也是 Linux Kernel 一个重要的模块。本篇主要着眼于 Linux 基于 System V 引入的 3 种 IPC 机制——信号量、消息队列、共享内存。除此之外,Linux 还有更多的方式能够实现进程间通信,但本文不做介绍。
本篇基于 Linux 4.9.87 版本源码
IPC 命名空间
读过前几篇的同学应该都能够了解,内核统一维护了所有的资源,并有限地向各个执行流暴露所需的资源。这保证了各个执行流看似独立地运行,但也为进程间的协作制造了障碍。基于这个原因,内核又提供了额外的机制来超脱这个限制。
struct kern_ipc_perm
{
spinlock_t lock;
bool deleted;
int id; /* 内核态内部 id */
key_t key; /* 保存用户程序用来唯一区分信号量的一个魔数 */
kuid_t uid;
kgid_t gid;
kuid_t cuid;
kgid_t cgid;
umode_t mode;
unsigned long seq;
void *security;
};
struct ipc_ids {
int in_use; /* 使用中的 IPC 对象数量 */
unsigned short seq; /* 用户空间 IPC 对象 ID */
struct rw_semaphore rwsem; /* 内核信号量,内核操作必备的锁机制 */
struct idr ipcs_idr; /* id 管理器,ipcs_idr 总是指向 kern_ipc_perm 对象 */
int next_id;
};
struct ipc_namespace {
atomic_t count; /* 被引用的次数 */
/* “核心”,每个数组元素对应一种 IPC 机制:信号量、消息队列、共享内存 */
/*
from ipc/util.h
#define IPC_SEM_IDS 0 信号量
#define IPC_MSG_IDS 1 消息队列
#define IPC_SHM_IDS 2 共享内存
*/
struct ipc_ids ids[3];
/* 以下都是对三种 IPC 机制设置的限制,诸如共享内存页的最大数量等 */
int sem_ctls[4];
int used_sems;
unsigned int msg_ctlmax;
unsigned int msg_ctlmnb;
unsigned int msg_ctlmni;
atomic_t msg_bytes;
atomic_t msg_hdrs;
size_t shm_ctlmax;
size_t shm_ctlall;
unsigned long shm_tot;
int shm_ctlmni;
int shm_rmid_forced;
struct notifier_block ipcns_nb;
/* The kern_mount of the mqueuefs sb. We take a ref on it */
struct vfsmount *mq_mnt;
/* # queues in this ns, protected by mq_lock */
unsigned int mq_queues_count;
/* next fields are set through sysctl */
unsigned int mq_queues_max; /* initialized to DFLT_QUEUESMAX */
unsigned int mq_msg_max; /* initialized to DFLT_MSGMAX */
unsigned int mq_msgsize_max; /* initialized to DFLT_MSGSIZEMAX */
unsigned int mq_msg_default;
unsigned int mq_msgsize_default;
/* user_ns which owns the ipc ns */
struct user_namespace *user_ns;
struct ucounts *ucounts;
struct ns_common ns;
};
IPC 由一个被称为 ipc_namespace 的数据结构维护,如果熟悉 pid_namespace 之类的,应该能够理解内核通过命名空间实现了资源的隔离。这里的 ipc_namespace 也是为了实现多个 ipc 环境所做的抽象。首先看下初始化 IPC 命名空间的流程。
/* from init/init_task.c */
/* 内核抽象的第一个任务 */
struct task_struct init_task = INIT_TASK(init_task);
/* from include/linux/init_task.h */
#define INIT_TASK(tsk) \
{ \
.nsproxy = &init_nsproxy, \
}
/* from kernel/nsproxy.c */
struct nsproxy init_nsproxy = {
.count = ATOMIC_INIT(1),
.uts_ns = &init_uts_ns,
#if defined(CONFIG_POSIX_MQUEUE) || defined(CONFIG_SYSVIPC)
.ipc_ns = &init_ipc_ns,
#endif
.mnt_ns = NULL,
.pid_ns_for_children = &init_pid_ns,
#ifdef CONFIG_NET
.net_ns = &init_net,
#endif
#ifdef CONFIG_CGROUPS
.cgroup_ns = &init_cgroup_ns,
#endif
};
/* from ipc/msgutil.c */
struct ipc_namespace init_ipc_ns = {
.count = ATOMIC_INIT(1),
.user_ns = &init_user_ns,
.ns.inum = PROC_IPC_INIT_INO,
#ifdef CONFIG_IPC_NS
.ns.ops = &ipcns_operations,
#endif
};
任务通过 fork、clone 等操作构建新的任务,并由 flag CLONE_NEWIPC 决定与父任务共享 IPC 命名空间或创建新的 IPC 命名空间。
struct ipc_namespace *copy_ipcs(unsigned long flags,
struct user_namespace *user_ns, struct ipc_namespace *ns)
{
if (!(flags & CLONE_NEWIPC))
/* 返回原来的 IPC 命名空间 */
return get_ipc_ns(ns);
/* 返回一个新的 IPC 命名空间 */
return create_ipc_ns(user_ns, ns);
}
信号量
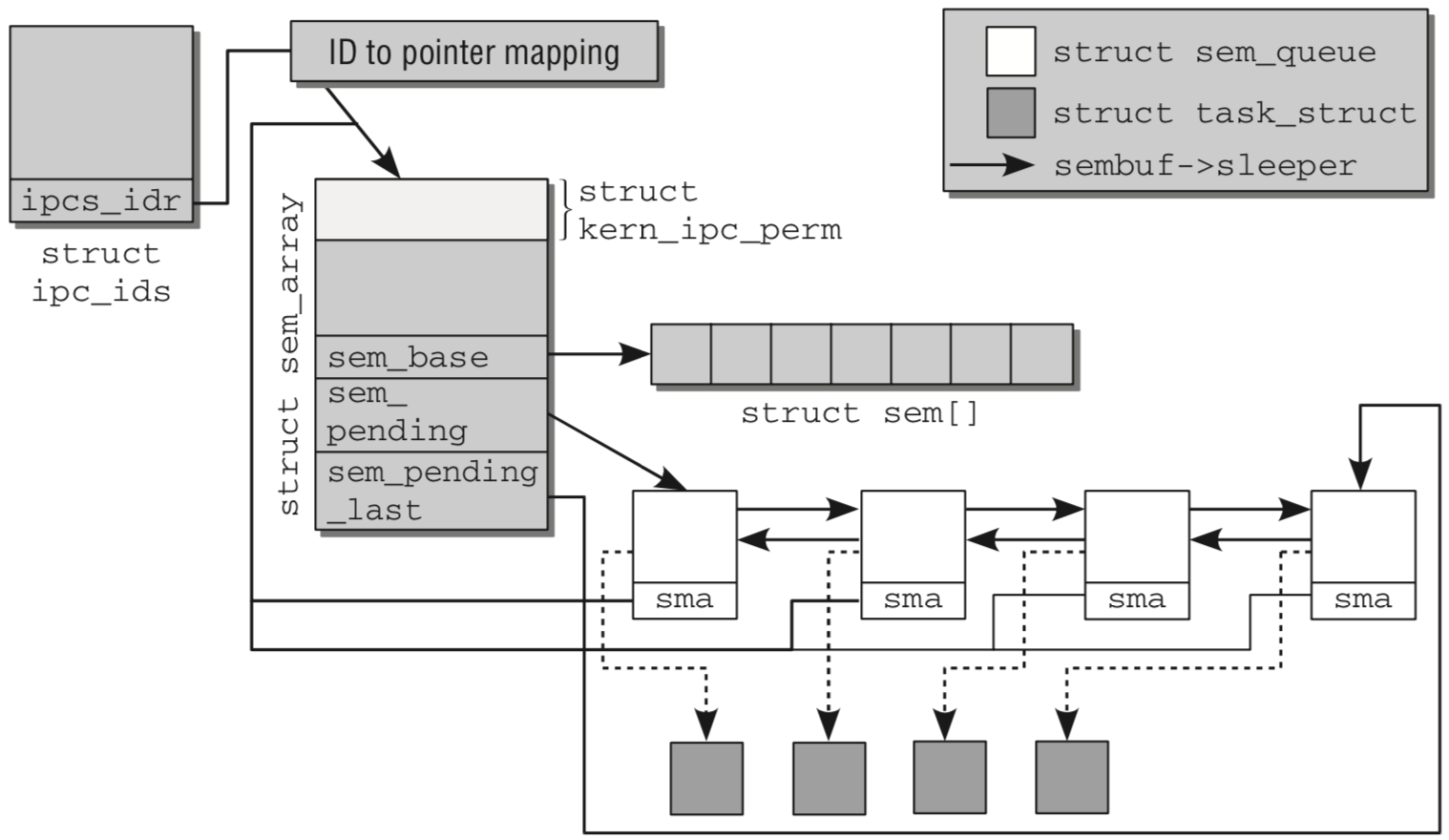
上图给出了各个结构间的关系,通过当前任务指向的 IPC 命名空间,找到 struct ipc_ids ,内核通过 ipcs_idr 找到 ID 到指针的映射关系,从而得到所需的 kern_ipc_perm 实例。同时 kern_ipc_perm 作为结构 sem_array 的第一个元素,使用技巧就可以直接定位到 struct sem_array 。
syscall semget
获取一个信号量
/* from ipc/sem.c */
SYSCALL_DEFINE3(semget, key_t, key, int, nsems, int, semflg)
{
struct ipc_namespace *ns;
static const struct ipc_ops sem_ops = {
.getnew = newary,
.associate = sem_security,
.more_checks = sem_more_checks,
};
struct ipc_params sem_params;
/* 获取当前任务的 IPC 命名空间 */
ns = current->nsproxy->ipc_ns;
if (nsems < 0 || nsems > ns->sc_semmsl)
return -EINVAL;
sem_params.key = key;
sem_params.flg = semflg;
sem_params.u.nsems = nsems;
return ipcget(ns, &sem_ids(ns), &sem_ops, &sem_params);
}
/* from ipc/util.c */
int ipcget(struct ipc_namespace *ns, struct ipc_ids *ids,
const struct ipc_ops *ops, struct ipc_params *params)
{
/* 如果标志位为“私有”,则创建新的 IPC 命名空间 */
if (params->key == IPC_PRIVATE)
return ipcget_new(ns, ids, ops, params);
/* 使用当前任务的 IPC 命名空间 */
else
return ipcget_public(ns, ids, ops, params);
}
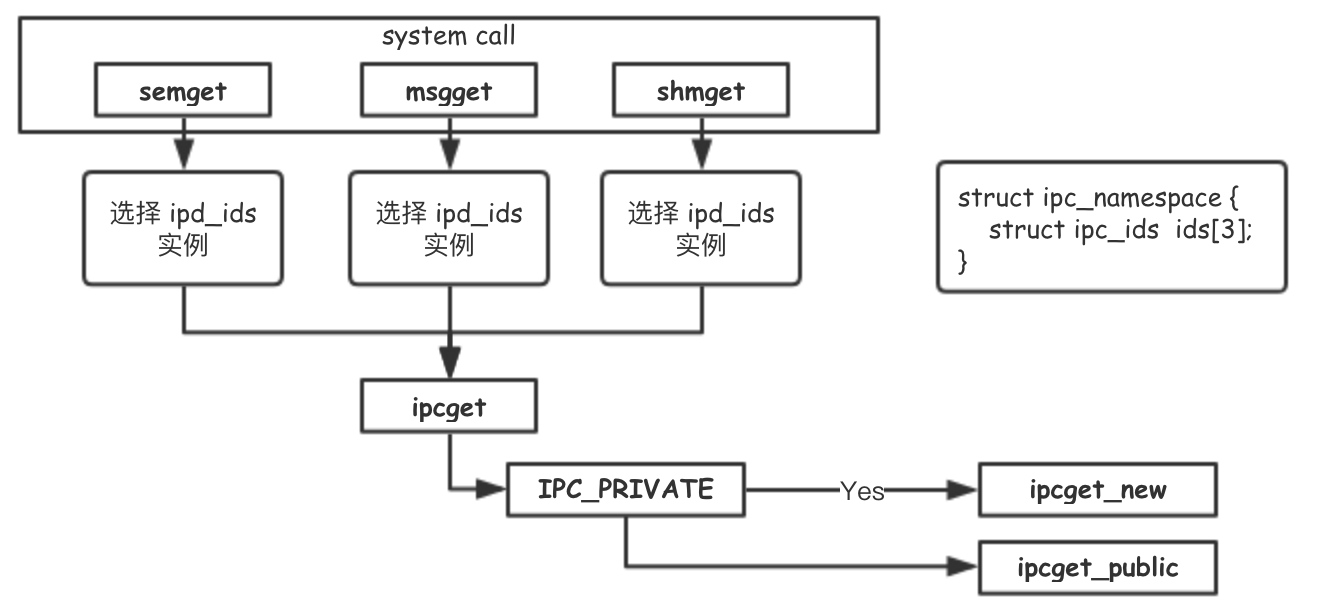
这里额外展示了 msgget, shmget,分别意味着消息队列、共享内存。获取 IPC 对象的流程都是相同的,有所区别的只是获取、写入和存储数据的方式。
// from 'ipc/util.c'
int ipcget_new(struct ipc_namespace *ns, struct ipc_ids *ids,
struct ipc_ops *ops, struct ipc_params *params)
{
int err;
retry:
err = idr_pre_get(&ids->ipcs_idr, GFP_KERNEL);
if (!err)
return -ENOMEM;
down_write(&ids->rw_mutex);
err = ops->getnew(ns, params);
up_write(&ids->rw_mutex);
if (err == -EAGAIN)
goto retry;
return err;
}
int ipcget_public(struct ipc_namespace *ns, struct ipc_ids *ids,
struct ipc_ops *ops, struct ipc_params *params)
{
struct kern_ipc_perm *ipcp;
int flg = params->flg;
int err;
retry:
err = idr_pre_get(&ids->ipcs_idr, GFP_KERNEL);
// 读写锁保护临界区
down_write(&ids->rw_mutex);
// 确认 KEY 是否存在
ipcp = ipc_findkey(ids, params->key);
if (ipcp == NULL) {
/* KEY 不存在,创建新的 */
if (!(flg & IPC_CREAT))
err = -ENOENT;
else if (!err)
err = -ENOMEM;
else
err = ops->getnew(ns, params);
} else {
/* KEY 存在,check ACL */
if (flg & IPC_CREAT && flg & IPC_EXCL)
err = -EEXIST;
else {
err = 0;
if (ops->more_checks)
err = ops->more_checks(ipcp, params);
if (!err)
err = ipc_check_perms(ipcp, ops, params);
}
ipc_unlock(ipcp);
}
// 离开临界区
up_write(&ids->rw_mutex);
if (err == -EAGAIN)
goto retry;
return err;
}
ipcget_new 和 ipcget_public ,核心的目标用 key 去换取一个 id (代表 struct kern_ipc_perm 在 ipcs_idr 整数指针管理器中的 id )。
如果这个 key 不存在,就考虑创建一个新的 struct kern_ipc_perm 。
// from 'include/linux/sem.h'
struct sem_array {
struct kern_ipc_perm sem_perm; /* permissions .. see ipc.h */
time_t sem_otime; /* last semop time */
time_t sem_ctime; /* last change time */
struct sem *sem_base; /* ptr to first semaphore in array */
struct sem_queue *sem_pending; /* pending operations to be processed */
struct sem_queue **sem_pending_last; /* last pending operation */
struct sem_undo *undo; /* undo requests on this array */
unsigned long sem_nsems; /* no. of semaphores in array */
};
// from 'ipc/sem.c'
static int newary(struct ipc_namespace *ns, struct ipc_params *params)
{
int id;
int retval;
struct sem_array *sma;
int size;
key_t key = params->key;
int nsems = params->u.nsems;
int semflg = params->flg;
if (!nsems) // 信号量集合中信号量数量不能为0.
return -EINVAL;
if (ns->used_sems + nsems > ns->sc_semmns) // 不能超过 IPC 信号量数量上限
return -ENOSPC;
size = sizeof (*sma) + nsems * sizeof (struct sem);
sma = ipc_rcu_alloc(size);
if (!sma) {
return -ENOMEM;
}
memset (sma, 0, size);
sma->sem_perm.mode = (semflg & S_IRWXUGO);
sma->sem_perm.key = key;
sma->sem_perm.security = NULL;
retval = security_sem_alloc(sma);
if (retval) {
ipc_rcu_putref(sma);
return retval;
}
id = ipc_addid(&sem_ids(ns), &sma->sem_perm, ns->sc_semmni);
if (id < 0) {
security_sem_free(sma);
ipc_rcu_putref(sma);
return id;
}
ns->used_sems += nsems;
sma->sem_perm.id = sem_buildid(id, sma->sem_perm.seq);
sma->sem_base = (struct sem *) &sma[1];
/* sma->sem_pending = NULL; */
sma->sem_pending_last = &sma->sem_pending;
/* sma->undo = NULL; */
sma->sem_nsems = nsems;
sma->sem_ctime = get_seconds();
sem_unlock(sma);
return sma->sem_perm.id;
}
syscall semctl
信号量控制操作。根据 cmd 的不同,可以获得信号集合中所有值(GETALL),获取最后一个操作信号集合的进程号(GETPID),统一设置信号集合中所有值(SETALL)
SYSCALL_DEFINE4(semctl, int, semid, int, semnum, int, cmd, unsigned long, arg)
{
int version;
struct ipc_namespace *ns;
void __user *p = (void __user *)arg;
if (semid < 0)
return -EINVAL;
version = ipc_parse_version(&cmd);
ns = current->nsproxy->ipc_ns;
switch (cmd) {
case IPC_INFO:
case SEM_INFO:
case IPC_STAT:
case SEM_STAT:
return semctl_nolock(ns, semid, cmd, version, p);
case GETALL:
case GETVAL:
case GETPID:
case GETNCNT:
case GETZCNT:
case SETALL:
return semctl_main(ns, semid, semnum, cmd, p);
case SETVAL:
return semctl_setval(ns, semid, semnum, arg);
case IPC_RMID:
case IPC_SET:
return semctl_down(ns, semid, cmd, version, p);
default:
return -EINVAL;
}
}
syscall semop
信号的 P/V 操作
// from 'ipc/sem.c'
asmlinkage long sys_semop (int semid, struct sembuf __user *tsops, unsigned nsops)
{
return sys_semtimedop(semid, tsops, nsops, NULL);
}
asmlinkage long sys_semtimedop(int semid, struct sembuf __user *tsops,
unsigned nsops, const struct timespec __user *timeout)
{
int error = -EINVAL;
struct sem_array *sma;
struct sembuf fast_sops[SEMOPM_FAST];
struct sembuf* sops = fast_sops, *sop;
struct sem_undo *un;
int undos = 0, alter = 0, max;
struct sem_queue queue;
unsigned long jiffies_left = 0;
struct ipc_namespace *ns;
// 获取当前任务的 ipc 命名空间
ns = current->nsproxy->ipc_ns;
if (nsops < 1 || semid < 0)
return -EINVAL;
if (nsops > ns->sc_semopm)
return -E2BIG;
if(nsops > SEMOPM_FAST) {
sops = kmalloc(sizeof(*sops)*nsops,GFP_KERNEL);
if(sops==NULL)
return -ENOMEM;
}
if (copy_from_user (sops, tsops, nsops * sizeof(*tsops))) {
error=-EFAULT;
goto out_free;
}
if (timeout) {
struct timespec _timeout;
if (copy_from_user(&_timeout, timeout, sizeof(*timeout))) {
error = -EFAULT;
goto out_free;
}
if (_timeout.tv_sec < 0 || _timeout.tv_nsec < 0 ||
_timeout.tv_nsec >= 1000000000L) {
error = -EINVAL;
goto out_free;
}
jiffies_left = timespec_to_jiffies(&_timeout);
}
max = 0;
for (sop = sops; sop < sops + nsops; sop++) {
if (sop->sem_num >= max)
max = sop->sem_num;
if (sop->sem_flg & SEM_UNDO)
undos = 1;
if (sop->sem_op != 0)
alter = 1;
}
retry_undos:
if (undos) {
un = find_undo(ns, semid);
if (IS_ERR(un)) {
error = PTR_ERR(un);
goto out_free;
}
} else
un = NULL;
sma = sem_lock_check(ns, semid);
if (IS_ERR(sma)) {
error = PTR_ERR(sma);
goto out_free;
}
/*
* semid identifiers are not unique - find_undo may have
* allocated an undo structure, it was invalidated by an RMID
* and now a new array with received the same id. Check and retry.
*/
if (un && un->semid == -1) {
sem_unlock(sma);
goto retry_undos;
}
error = -EFBIG;
if (max >= sma->sem_nsems)
goto out_unlock_free;
error = -EACCES;
if (ipcperms(&sma->sem_perm, alter ? S_IWUGO : S_IRUGO))
goto out_unlock_free;
error = security_sem_semop(sma, sops, nsops, alter);
if (error)
goto out_unlock_free;
error = try_atomic_semop (sma, sops, nsops, un, task_tgid_vnr(current));
if (error <= 0) {
if (alter && error == 0)
update_queue (sma);
goto out_unlock_free;
}
/* We need to sleep on this operation, so we put the current
* task into the pending queue and go to sleep.
*/
queue.sma = sma;
queue.sops = sops;
queue.nsops = nsops;
queue.undo = un;
queue.pid = task_tgid_vnr(current);
queue.id = semid;
queue.alter = alter;
if (alter)
append_to_queue(sma ,&queue);
else
prepend_to_queue(sma ,&queue);
queue.status = -EINTR;
queue.sleeper = current;
current->state = TASK_INTERRUPTIBLE;
sem_unlock(sma);
if (timeout)
jiffies_left = schedule_timeout(jiffies_left);
else
schedule();
error = queue.status;
while(unlikely(error == IN_WAKEUP)) {
cpu_relax();
error = queue.status;
}
if (error != -EINTR) {
/* fast path: update_queue already obtained all requested
* resources */
goto out_free;
}
sma = sem_lock(ns, semid);
if (IS_ERR(sma)) {
BUG_ON(queue.prev != NULL);
error = -EIDRM;
goto out_free;
}
/*
* If queue.status != -EINTR we are woken up by another process
*/
error = queue.status;
if (error != -EINTR) {
goto out_unlock_free;
}
/*
* If an interrupt occurred we have to clean up the queue
*/
if (timeout && jiffies_left == 0)
error = -EAGAIN;
remove_from_queue(sma,&queue);
goto out_unlock_free;
out_unlock_free:
sem_unlock(sma);
out_free:
if(sops != fast_sops)
kfree(sops);
return error;
}
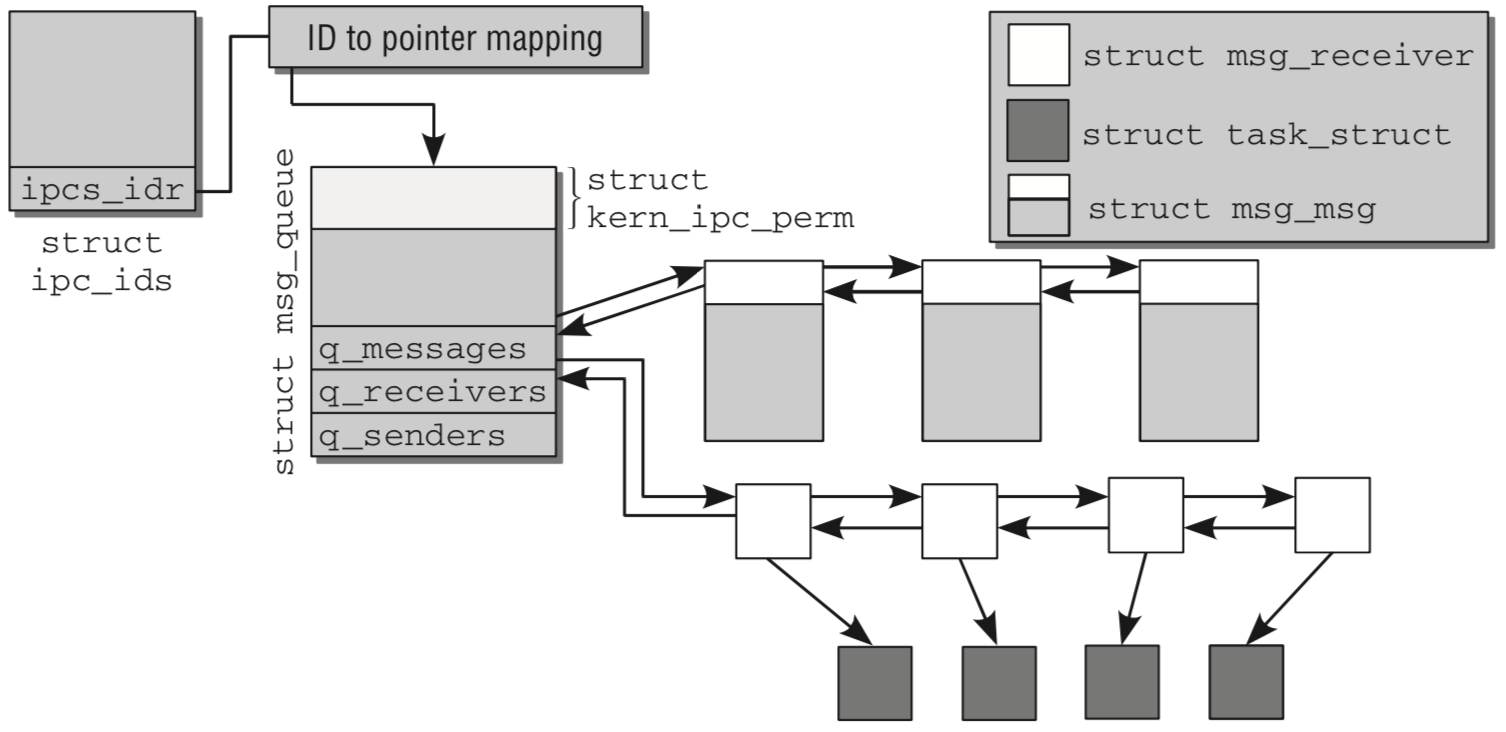
消息队列
至于消息队列和共享内存,都利用了类似的技术,通过在 IPC 命名空间下,使用 struct idr 做 KEY, VALUE 的管理,从而维护起了一系列互不干扰的消息队列、共享内存。
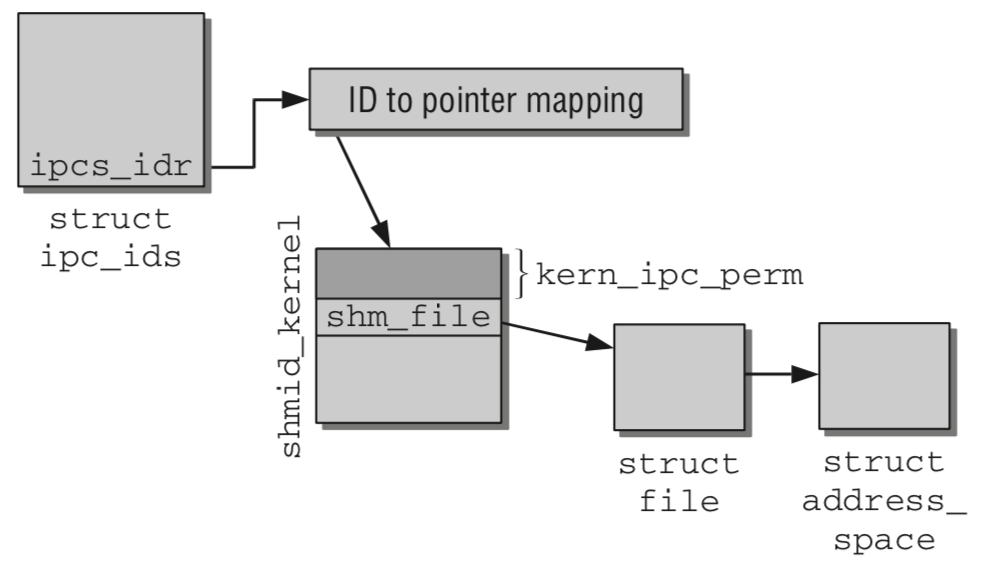
共享内存
结束
局限于目前未能找到 SysV IPC 的经典利用场景,加之平时工作接触甚少。本篇匆匆结尾,未详细展示不同 IPC 技术在不同使用场景下的优劣。
相对而言,日常更多使用的 IPC 技术反而是管道、多进程共同读写文档等。
此坑估计不会再填了…
__ __
/ _| __ _ _ __ __ _ / _| ___ _ __ __ _
| |_ / _` | '_ \ / _` | |_ / _ \ '_ \ / _` |
| _| (_| | | | | (_| | _| __/ | | | (_| |
|_| \__,_|_| |_|\__, |_| \___|_| |_|\__, |
|___/ |___/